Modèles théoriques d’un robot avec deux chenilles
Pour pouvoir commencer un modèle informatique, il nous faut des équations ! Mais comment les trouver ? Il faut d’abord établir un modèle physique du robot avec les particularités qu’il possède. Ici, on imagine un robot à deux chenilles. Voici sa modélisation :
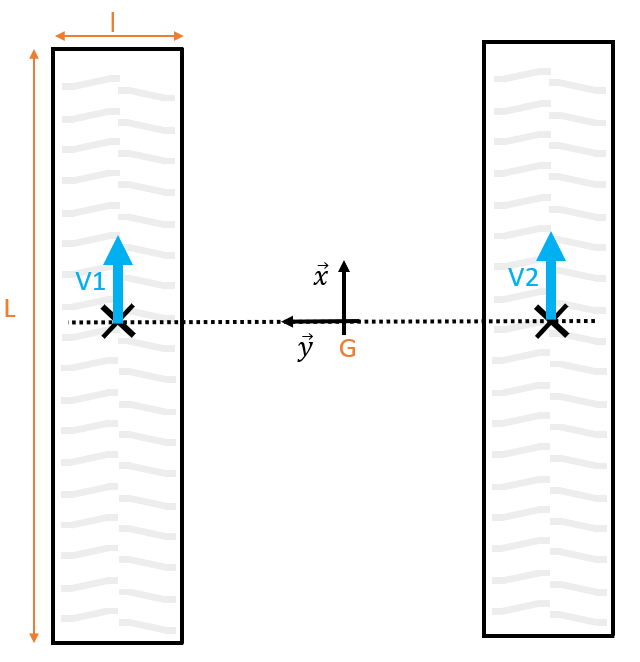
Schéma de deux chenilles
Le vecteur R, au centre du robot, exprime mathématiquement la position de celui-ci dans le plan.
Étude de la trajectoire du robot et des pertes de puissance par frottement
On suppose que les deux chenilles ont deux vitesses indépendantes l’une de l’autre. On se pose alors la question : quelle sera la trajectoire du robot au cours du temps ? Connaissant la trajectoire, on peut estimer les pertes par frottements et le couple moteur.
L’ensemble du rapport sur les chenilles est à retrouver ci-joint :
Rapport efforts et puissances d’une chenille Excel de calcul chenille
Modèle de détection d’obstacles
La détection d’obstacles est obligatoire pour la sécurité des utilisateurs, et pourrait être nécessaire pour un déplacement autonome. Elle est réalisée par des capteurs de distance. On peut penser à un lidar ou un sonar. Cependant, la difficulté de cette détection réside dans le traitement informatique.
Étude sur la détection d’obstacle, dans l’espace, avec un capteur unidirectionnel
On s’intéresse dans cette étude à des expressions mathématiques donnant la position des points obstacles à l’aide d’un capteur sans temps de réponse, donnant la distance selon une direction exacte et absolue.
Voici le rapport de cette étude mathématique :
Modélisation sur le logiciel AMESIM
Les simulations permettent d’appréhender le comportement du système et les potentiels dysfonctionnements. Elles apportent aussi des éléments dans le dimensionnement des composants du système.
Le logiciel AMESIM
AMESIM est un logiciel de modélisation multiphysique développé par SIEMENS. Il permet de modéliser un système dans son ensemble en comprenant les sous-ensembles mécanique, hydraulique, électrique, thermique, etc. On obtient une modélisation multiphysique. Le logiciel fonctionne selon le principe de causalité entre les différents modules.
Pour réaliser une modélisation, le modèle réel doit être simplifié et adapté en fonction de ce que l’on souhaite en tirer. La modélisation est une approximation de la réalité.
Un premier modèle
Dans un premier temps, on s’est intéressé au déplacement du robot. Le robot est équipé deux chenilles pilotées chacune par un moteur à courant continu. Les moteurs doivent être dimensionnés en fonction des puissances à transmettre aux chenilles pour mettre en mouvement le robot. En mouvement, le robot peut translater et tourner sur lui-même. Ces deux possibilités de mouvement sont étudiées séparément pour simplifier les modélisations.
Le premier modèle représente la translation du robot en marche avant et marche arrière. Pour simuler le robot, on considère que chaque chenille est une masse en translation reliées ensemble au corps principal qui est aussi une masse. Chaque chenille est pilotée par un moteur à courant continu.
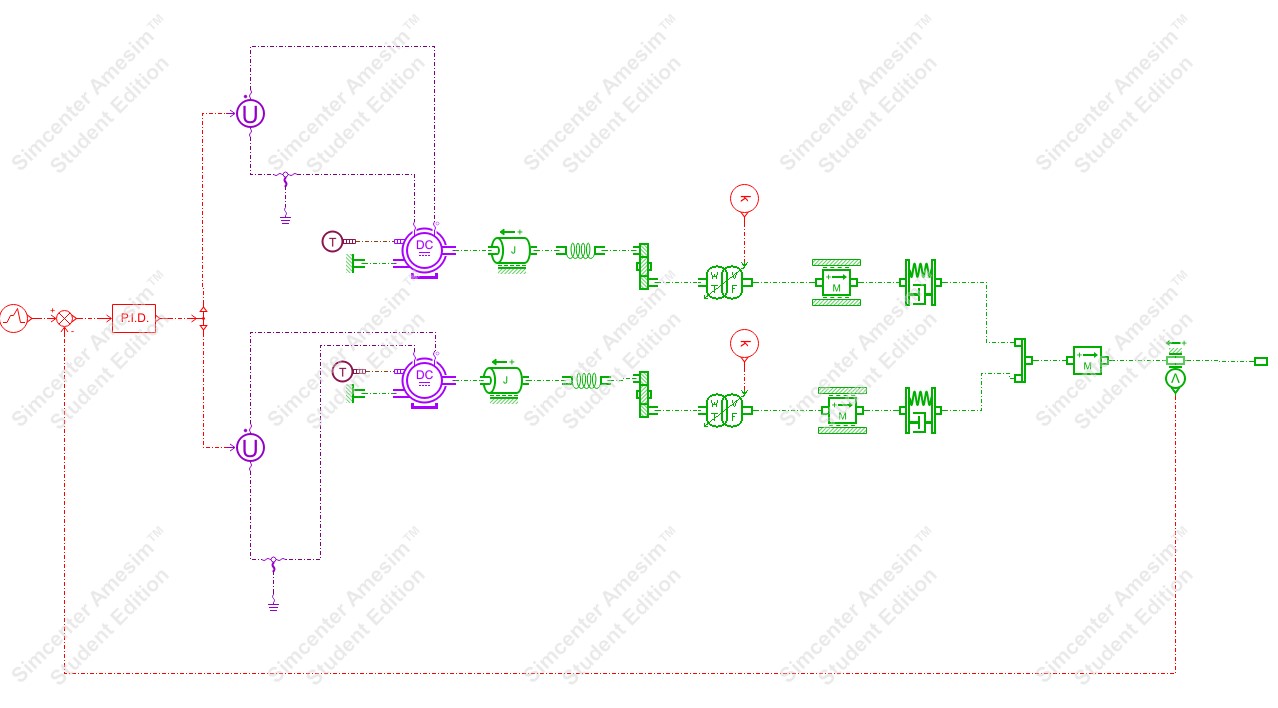
Modélisation en translation du comportement de la chenille sur AMESIM
Ce premier modèle est asservi en vitesse pour respecter le cahier charge qui impose une vitesse de déplacement maximale de 1.5 m/s. On peut ainsi imposer différentes lois de mouvement en vitesse au robot.
Cette simulation permet d’étudier les puissances mises en jeu dans le système, notamment les pertes de puissance au niveau des chenilles.
Un deuxième modèle
Le second modèle représente le comportement du robot en rotation. Lorsque le robot tourne sur lui-même, la chenille intérieure tourne dans un sens et la chenille tourne dans l’autre sens. Cela a pour effet de faire glisser les chenilles sur le sol. Ce glissement peut induire une perte de puissance importante qu’il faut quantifier. Chaque chenille réalise un bras de levier sur le corps principal pour l’entraîner en rotation. On pourrait imaginer que la chenille extérieure pousse le corps et que la chenille intérieure tire vers elle le robot.
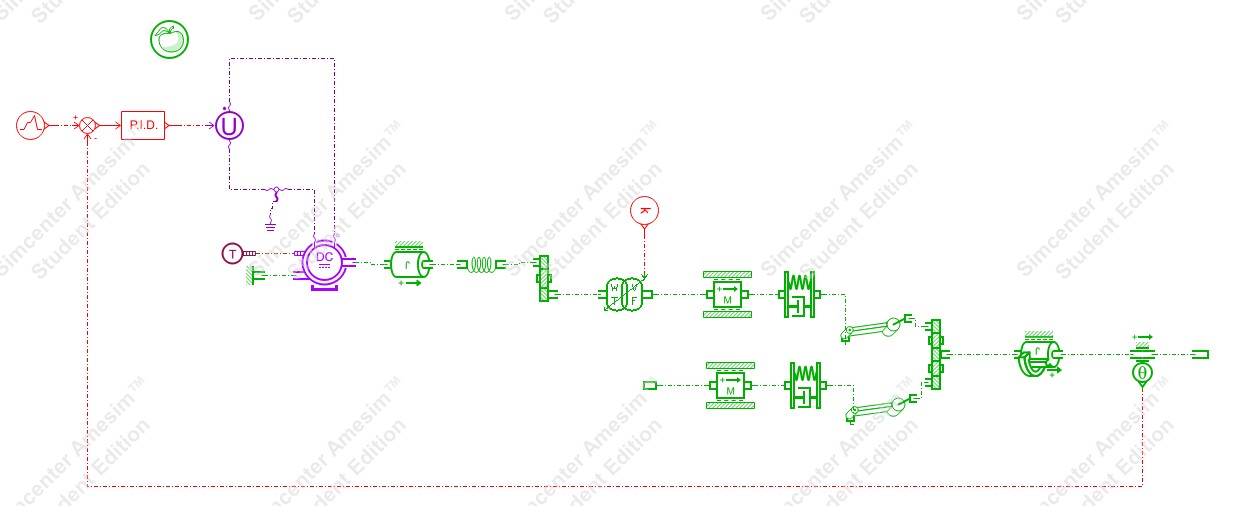
Modélisation de la rotation du robot sur lui-même sur AMESIM
Ce second modèle est asservi en position angulaire. On peut gérer son orientation face à un mur et adapter son parcours face à des obstacles.