La conception mécanique
3 parties constituent la conception mécanique du robot ARVI :
-

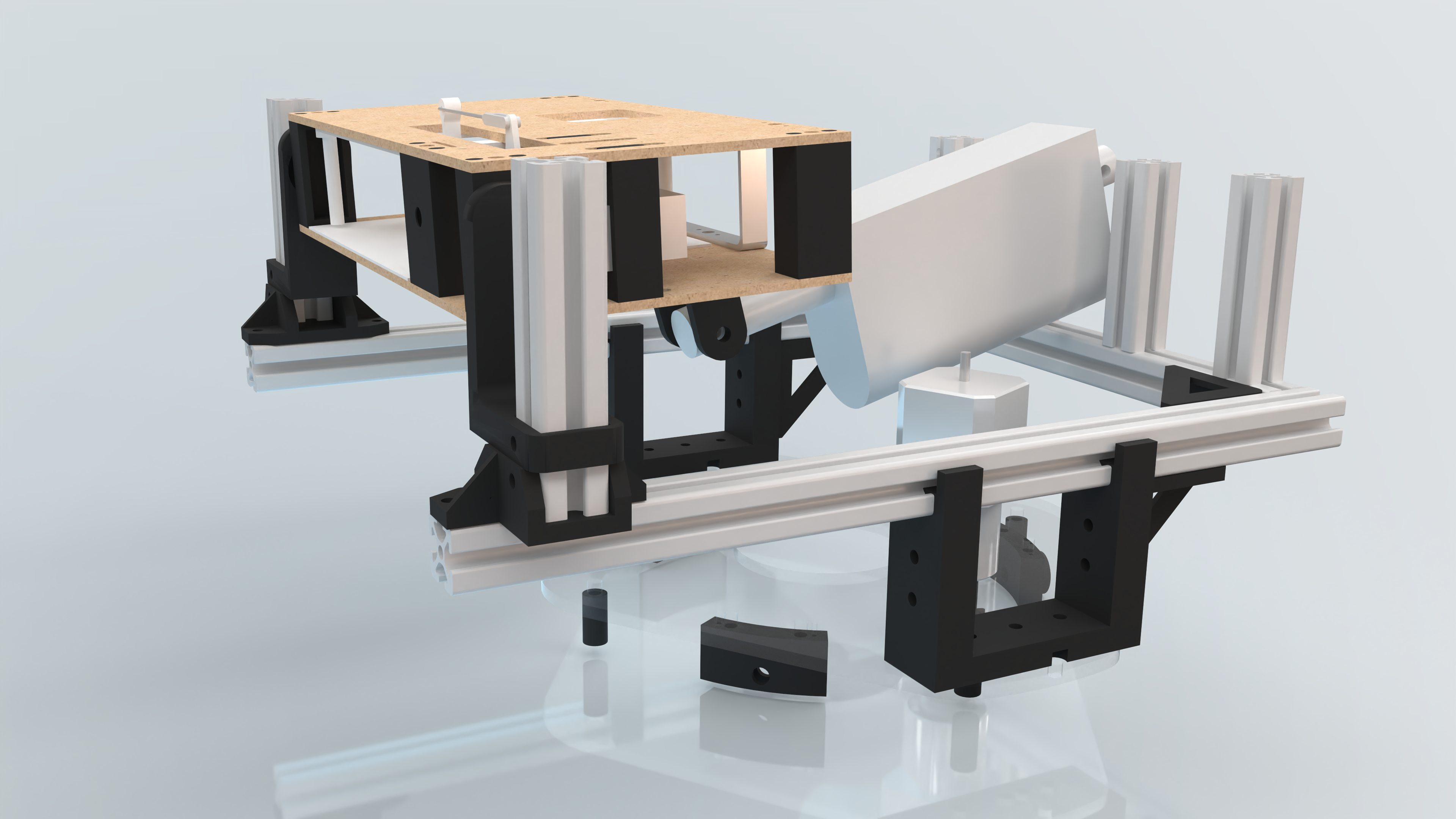
- Les chenilles
-
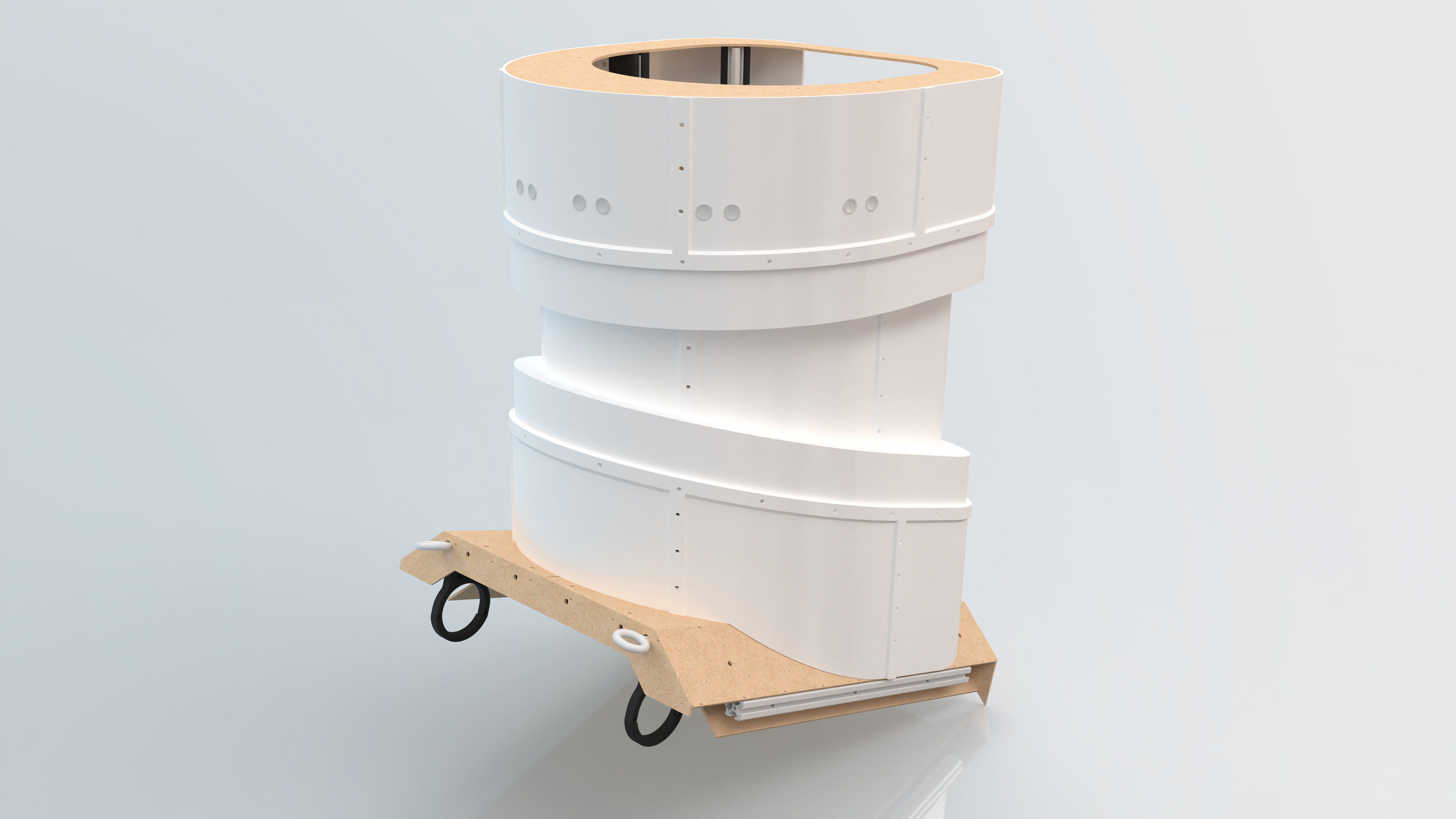
- Le corps
-
- La tête
Les chenilles et la tête du robot sont les parties les plus complexes à réaliser mécaniquement. Ce sont ces parties qui sont responsables de la mobilité du robot (chenilles) et de ses capacités de vidéoprojection (tête). Le corps est la structure, le squelette du robot ainsi que l’apparence extérieure du robot.
Afin de détailler au mieux la conception, une explication du choix de la solution et une description de la conception sur 3DEXPERIENCE, le logiciel de CAO que nous avons utilisé, seront fournies pour chaque composant du robot.
| Découvrir la conception des chenilles | Découvrir la conception du corps | Découvrir la conception de la tête |
La conception électronique
Le robot ARVI ne serait rien sans électronique. L’électronique est ce qui permet d’animer le robot. La conception électronique a consisté au choix et au dimensionnement de nombreux composants comme :
- Les moteurs et autres actionneurs
- Les pré-actionneurs
- Les batteries
- Et les capteurs
Comme pour la conception mécanique, l’électronique a été segmentée en plusieurs parties : une partie au niveau du bas du robot, une partie au niveau du corps du robot et une dernière dans la tête du robot.