Les débuts de réflexion
Après avoir réalisé une pré-étude du projet, nous nous sommes penchés sur la réflexion de différentes solutions techniques. Celles-ci doivent répondre aux besoins du cahier des charges. Nous avons essayé de réfléchir à plusieurs solutions pour les 3 problématiques suivantes : déplacement, inclinaison du vidéoprojecteur, et mise au point.
Déplacement
Dans un premier temps, nous avons réfléchi au moyen de déplacement de notre robot. Après avoir fait un état de l’art, nous avons conclu 2 familles de transmission de mouvement : les roues ou les chenilles.
Roues :
-
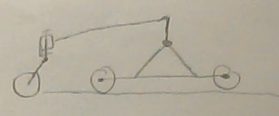
- Schéma de solution de déplacement avec deux roues motorisées et une roue folle
-
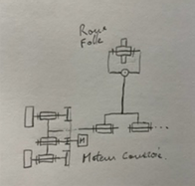
- Schéma simplifié d’un biplan et d’une roue folle
-
- Schéma architectural d’une solution de déplacement avec des roues
Chenilles :
-
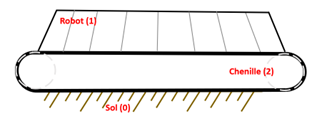
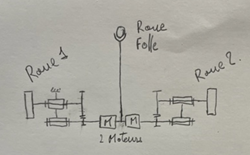
- Forme de chenille plate
-
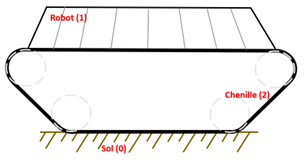
- Forme de chenille trapézoïdale
-
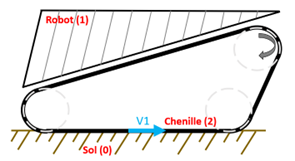
- Forme de chenille triangulaire
Entre ces 2 familles de type de déplacement, nous avons choisi une transmission avec chenilles de part leur aspect mais aussi par le fait que ce type de transmission permet d’aller sur tout type de terrain et de franchir de petits obstacles (pas de porte par exemple).
Inclinaison du vidéoprojecteur
Dans un deuxième temps, nous nous sommes penchés sur le moyen d’inclinaison du vidéoprojecteur.
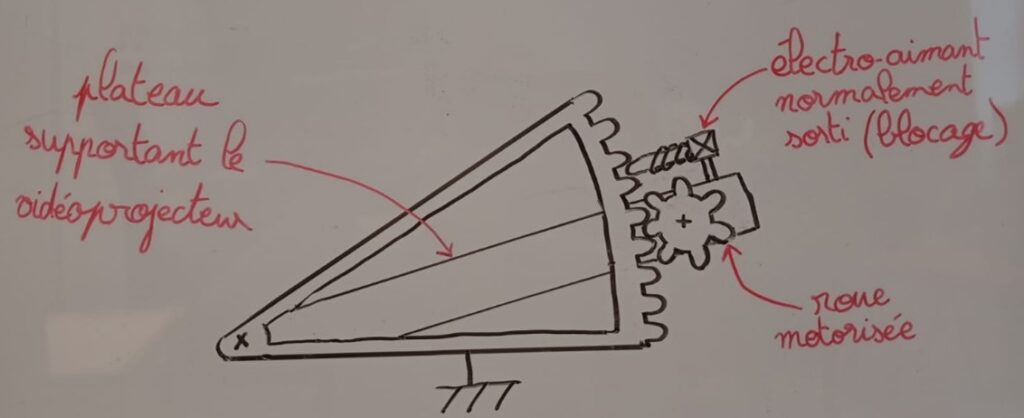
Solution n°1 :
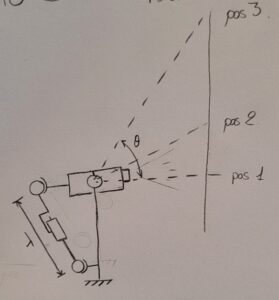
La première solution imaginée est un système à arc cranté. Le vidéoprojecteur, posé sur une plaque, se déplace sur l’arc grâce à un moteur muni d’un engrenage. Une tige permet de bloquer la position afin de ne pas solliciter le moteur et ainsi d’économiser de l’énergie et gagner en autonomie.
-
- Schéma de la solution à cran d’inclinaison du vidéoprojecteur
Solution n°2 :
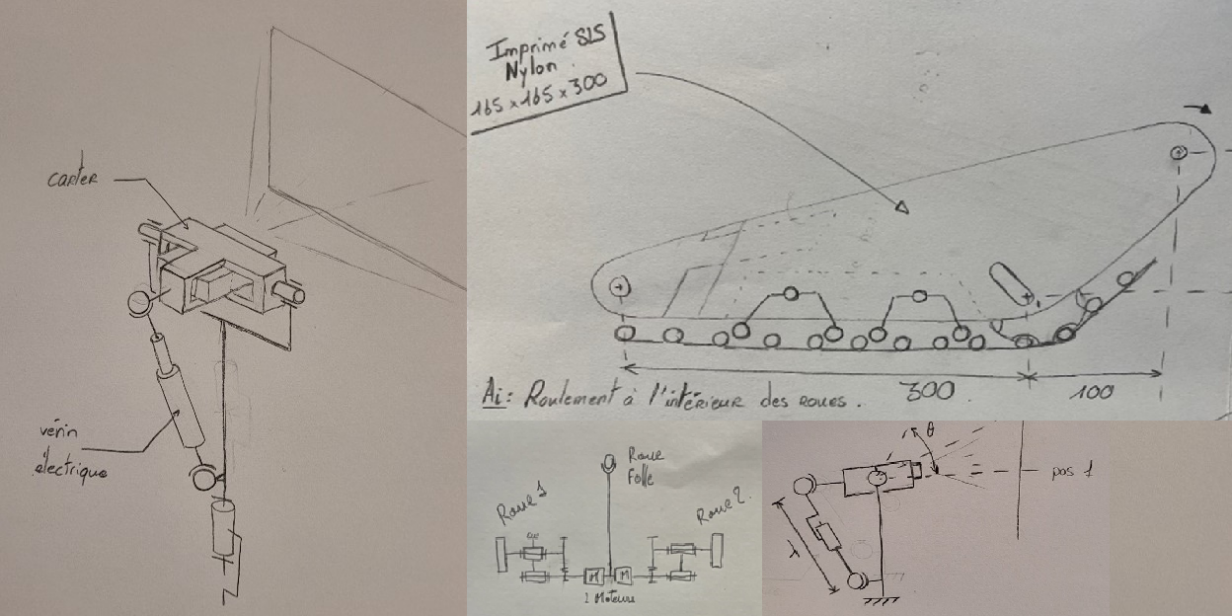
La seconde solution est un système d’inclinaison effectué par un vérin électrique piloté par une Raspberry Pi. La liaison vis/écrou implantée dans le vérin permet d’autobloquer le système, évitant ainsi un courant de maintien.
-
- Schéma de la solution avec vérin d’inclinaison du vidéoprojecteur (profil)
-
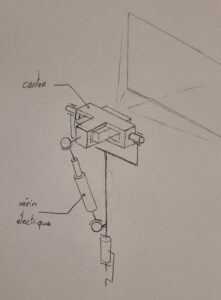
- Schéma de la solution avec vérin d’inclinaison du vidéoprojecteur (perspective)
Mise au point du vidéoprojecteur
Enfin, nous avons dû réfléchir à des solutions capables de gérer la mise au point du vidéoprojecteur.
La solution que nous avons trouvée pour faire la mise au point automatique est un système de bielle reliant la bague du vidéoprojecteur et un servomoteur qui pilote l’angle de la bague.
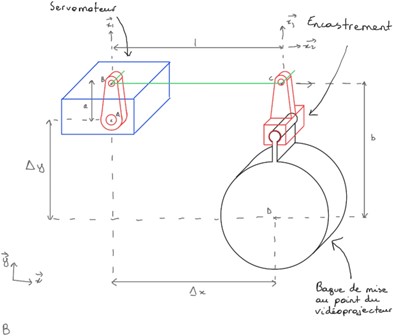
Schéma du bouclage géométrique de l’adaptation du vidéoprojecteur
Après cette réflexion sur les différentes solutions proposées, il est nécessaire de choisir les solutions adaptées au robot mais aussi répondants le plus efficacement au cahier des charges.