Choix des solutions
Maintenant que les études d’avant-projet ont été faites, un début de réflexion nous permet de passer aux premiers croquis de conception. Les diverses études précédentes nous ont permis d’effectuer des choix de conception que nous devons étudier et designer pour les mettre en application. Pour cela, la conception est divisée en deux grandes parties : le module de déplacement et le module de vidéoprojection.
Déplacement
Le choix des chenilles ou des roues répond à notre cahier des charges. Rien ne permettait vraiment de choisir l’une plutôt que l’autre. En commun accord, nous avons fait le choix d’intégrer des chenilles. En effet, après réflexion l’esthétisme nous a semblé être un indicateur important et les chenilles nous offrent plus de possibilités de designs innovants, c’est ce qui a déterminé notre choix final.
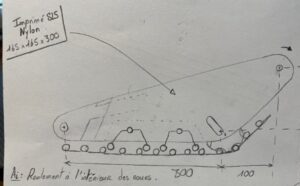
Après cela, nous avons pu commencer les études préliminaires : forme des chenilles, intégration au robot, calculs et modèles multiphysiques. Nous avons pu étudier aussi l’influence et la nécessité des éléments caractéristiques d’une chenille tels que la suspension, le tendeur, le barbotin.
-
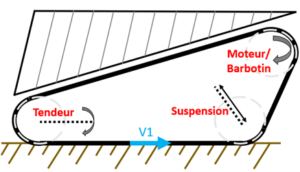
- Structure des chenilles
-
- Vue globale du mécanisme des chenilles
-
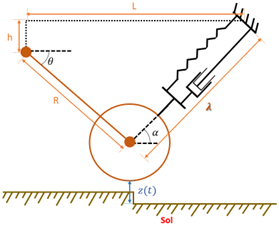
- Schéma de l’amortisseur
-
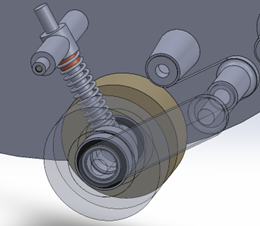
- CAO de l’amortisseur
Vidéoprojection
1. Inclinaison
Nous avions réfléchi à différentes solutions pouvant répondre à notre cahier des charges. Après réflexion et pré-étude, la meilleure solution retenue à ce jour est un système pilotant le vidéoprojecteur grâce à un vérin électrique. Le système autobloquant du vérin (à condition qu’il soit irréversible) permet de maintenir la position du vidéoprojecteur sans aucune source d’énergie, augmentant ainsi l’autonomie du robot. Le vérin sera piloté grâce à carte Raspberry.
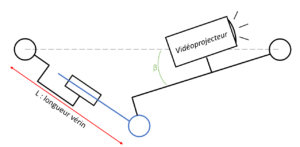
Schéma de la conception de l’inclinaison du vidéoprojecteur
-
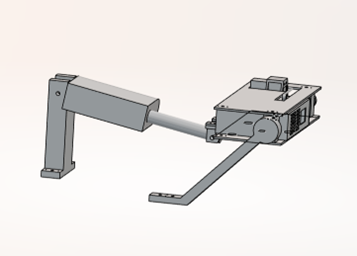
- CAO du système d’inclinaison (à 0°)
-
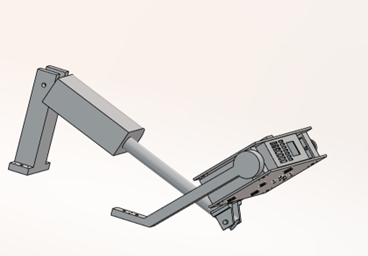
- CAO du système d’inclinaison (à 45°)
2. Mise au point automatique
Le cahier des charges indique que la mise au point du vidéoprojecteur doit s’effectuer automatiquement, sans intervention humaine. Ceci permet d’améliorer le confort d’utilisation du robot et de simplifier la mise au point. Pour la régler, il faut mettre en rotation la bague de réglage. La solution retenue pour répondre à cette problématique est un système à bielle reliant la bague à un servomoteur.
-
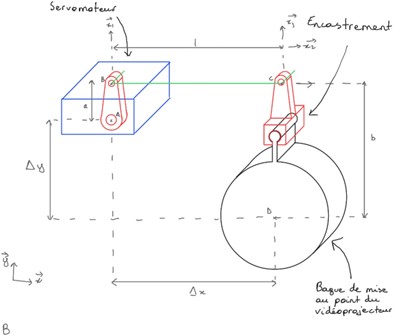
- Dessin de la solution d’autofocus
-
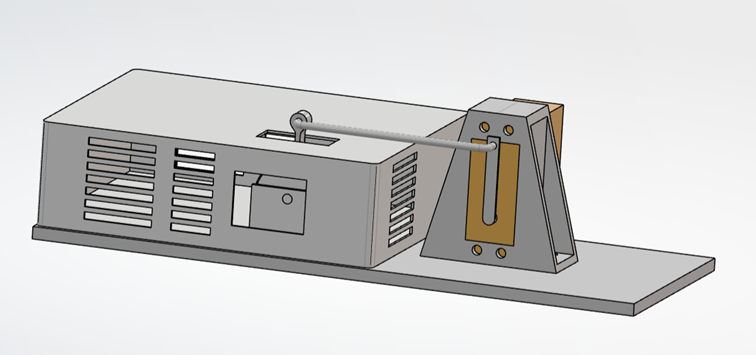
- CAO de la solution d’autofocus
Electroniquement, un capteur permettra de connaître la distance entre le vidéoprojecteur et la surface de projection et une caméra permettra de calculer la netteté grâce à la projection d’une image de calibration. La correction sera transférée au moteur pour qu’il puisse modifier la position de la bague.